Last night was a good night for kart construction. we got a tie rod stretched between the wheels. it is just a bunch of allthread with some dethreaded sections on the end. these dethreaded sections make it easier to adjust, since we can just chuck it up in a drill and spin the rod rapidly to get it on or off the car. It works well enough to connect the two sides together, but needs some tweaking. Tie rod ends are nuts welded to coupling nuts.
Also related to steering (and throttle, and brakes), someone at the space had the bright idea to cannibalize a razor electric scooter which had a throttle grip, a brake lever, its own self-contained ball-bearing mount, and a telescoping/folding mechanism. This scooter was a dumpster find but can be found on craigslist for $50, and it also includes a battery, motor, motor controller, wheels, charger, etc which we didn’t use. I think next year we may see more of these used for steering because when we want to change drivers or if we get in a frontal collision, the steering system just sort of folds away from the driver without actually becoming disconnected. it’s perfect for us.
Perhaps most importantly, we got all our drive components finally. we were able to weld the motor mount pods onto the frame and get the motors hooked up. The pictures don’t show a whole lot, but that’s OK since the mounts need a bit of tweaking and reinforcing at this point anyway.
finally, we turned the original front bumper into a foot rest. we ran a piece of metal up through it to make it more robust, then welded that piece of metal to the frame.
Here’s a test video. Next up: iron out the kinks, and add power.
Progress has been slow. in the past week we’ve gotten all the requisite parts, but have been lacking in time to assemble it all.
all 4 wheels are now on the kart, and the original body fits surprisingly well. Fronts are 4″ steel wheels from Harbor Freight, $6.99 apiece with some real bearings in there. Rears are 5″ azusalite nylon wheels from a member’s gravity car.
some of our drivers, too, fit surprisingly well. We’ve had to widen the roll cage a bit to accommodate adults, and we removed some of the crossbars from the existing ‘rollcage’ so they wouldn’t interfere with seating position, but aside from that the exterior of the body is just about completely stock.
the body rests on a simple frame of angle iron. It supports our vertical loads well, and is torsionally flexible. This is good because it will serve as rudimentary suspension and will prevent the castered front outside wheel from coming off the ground under cornering. The front wheels have caster so they experience negative camber during cornering, which should allow the tire to maintain a proper contact patch. While we expect understeer due to the relative dearth of weight on the front axle compared to the rear (and the better tires with a larger contact patch on the rear), caster should help mitigate it.
Power will be delivered to the rear wheels from the EV warrior motors via #35 chain. Attached to the rear wheels are 60-tooth sprocket drums. Since these are also part of the braking assembly, their cost is not counted toward our $500 target. The donor kart did not need a chain drive so we had to remove the original brake drums to make way for the new ones. brakes are azusa 4.5″ drum assemblies, also from the gravity kart. they will be actuated by a hand lever on the steering yoke.
We even have comfortable seating worked out! A member brought over many, many office chairs so we a good selection to pick out the sturdiest, perfect-fitting seat. with the nature of the seat and the posture, the kart is surprisingly comfortable to sit in and feels stable as well. The body has been cut out to lower the bottom of the seat to within an inch of the minimum ‘axle height’ rule. this, combined with the slightly laid-back posture of the driver, should keep the CG as low as we can get. perhaps we won’t need the frame extensions we’ve kept on for provisional wheelie bars!
Now it’s on to drivetrain and steering. we hope to have the thing rolling by the end of Wednesday night
We’ve decided to build an entry for this year’s Power Racing Series race at the 2012 NYC Maker faire! Some of our members have been interested in doing similar things for a while, and having a PPPRS event this close was motivation enough to get of our lazy butts and do something about it.
The first steps were to procure a power wheels vehicle, motors, and batteries. A power wheels Xtreme Machine, some EV warrior motors, and a pair of brand new optima yellowtop D34′s fit the bill just fine.
first, we had to do a test-fit just to see if any of us could still fit in there. Some of us could, some couldn’t, and only one looked to be enjoying it.
Then we dug up some scrap metal from previous projects, and got to cutting and welding.
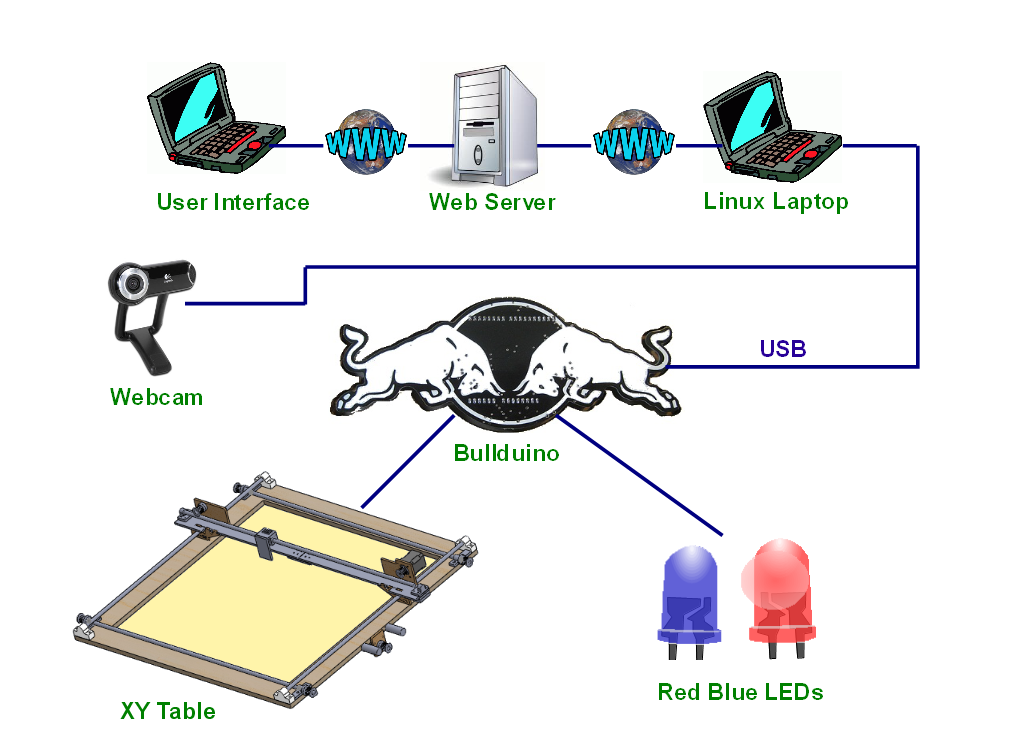
For this year’s RedBull Creation competition, we had to incorporate a ‘Bullduino’ into the project of our choice. What is a Bullduino? It’s essentially an Arduino Uno shaped like the RedBull logo. So, we came up with the idea of creating a Telepresence Zen Garden. Sounds simple right? Well, it was actually more difficult than it sounds.
The diagram below shows you from a high level what we did. We created a user interface in Flash which allows the user to draw lines on a canvas. That data is uploaded to a web server and stored into a MySQL database. There is a queuing system written in PHP on the web server. The queuing system keeps track of the order in which the drawings are submitted and it is responsible for keeping the buffer full on the Bullduino. The connection between the web server and the Bullduino is a TCP socket which is forwarded to the USB-to-Serial connection on the Bullduino.
The linux laptop is running 2 things. It’s running socat which does the TCP to Serial forwarding and the Flash media encoder which streams a video feed back to justin.tv.
The Bullduino is connected to a rail of power mosfets to control turning on and off 8 banks of Red and Blue LEDs. It is also connected to 2 stepper motor drivers, 2 servos, and 4 limit switches. The limit switches are used to zero out the XY table and prevent damage to the machine should something go wrong.
One of the servos is responsible for raising and lowering the drawing pen. The other is responsible for raising and lowering the eraser bar. Here is a little video showing how the eraser bar works.
The entire system is powered by a modified ATX power supply which provides 12V for the stepper motors and 5V for everything else. The construction of the Zen Garden was a combination of hand cut MDF, laser cut wood and 3D printed brackets and pulleys.
Finding the right sand was critical. A very fine grain sand provided the best detail. We settled on using 20lbs of Nature’s Ocean Premium White Sand from Petco. We experimented with different grain sizes and even mixed the smallest grain size with the larger grain sizes but this did not provide the detailed land and peaks that the Nature’s Ocean sand provided.
Note to self: sifting sand through a Mexican hat is not fun. Be sure to buy extra sand for experimentation.